Bayesian Filter
Created 2021.05.16 by William Yu; Last modified: 2022.07.12-V1.2.2
Contact: windmillyucong@163.com
Copyleft! 2022 William Yu. Some rights reserved.
Kalman Filter
卡尔曼滤波(Kalman filter)1960.
refitem:
- paper https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf
- blog https://zhuanlan.zhihu.com/p/39912633
- blog https://longaspire.github.io/blog/%E5%8D%A1%E5%B0%94%E6%9B%BC%E6%BB%A4%E6%B3%A2/
- blog https://zhuanlan.zhihu.com/p/48876718
- blog 关于协方差矩阵 https://zhuanlan.zhihu.com/p/338335181
Basic Concepts
- $(\check.)$ 表示先验
-
$(\hat.)$ 表示后验(即最佳估计值)
- 高斯白噪声
- 符合高斯分布
- 基本模型
- 马尔科夫链
- 基本过程,包括两个阶段:
- 预测阶段
- 使用上一状态的估计,做出对当前状态的估计
- 更新阶段
- 使用对当前状态的观测值优化之前在预测阶段获得的预测值,获得更精确的估计值
- 预测阶段
- 特点
- 适合不断变化的系统,时变系统
- 内存占用较小(只需保留前一个状态)
- 速度快
状态方程
\[\vec x_k : (\vec p,\vec v)\]- 状态 $\vec x$ 由两部分组成
- $\vec x$ 的实际值并不知
- 卡尔曼滤波假设每个变量(在我们的例子里是位置和速度)都应该是随机的,而且符合高斯分布。每个变量都有一个均值 $\mu$ ,它是随机分布的中心;有一个方差$\sigma^2$
- 这些输入信息可能是相关的,也可能不是相关的

- 协方差矩阵
Model
1.1 运动方程(状态转移方程)
系统的状态转移方程(运动方程),线性方程 \(x_k = A \cdot x_{k-1} + B \cdot u_{k} + w_{k} \tag1\)
- where:
- $x_k$ : k时刻的运动模型预估的系统状态
- $u_k$ :k时刻对系统的控制量
- A :转移矩阵,运动模型
- B:系统参数
- $w_k$:过程激励噪声
1.2 观测方程
\[z_k = H \cdot x_k + v_k \tag2\]-
where:
- $z_k$:k时刻的观测值
- H:观测系统的参数
- $v_k$:观测过程的噪声
1.3 噪声
\[\begin{align} p(w) ∼ N (0, Q) \\ p(v) ∼ N (0, R) \end{align}\]- 随机信号 w(k) 和 v(k) 分别表示运动噪声和观测噪声
- 假设它们为相互独立,正态分布的白色噪声
- 实际系统中,这QR可能会随着每次迭代计算而发生变化,但此处假设他们是常量
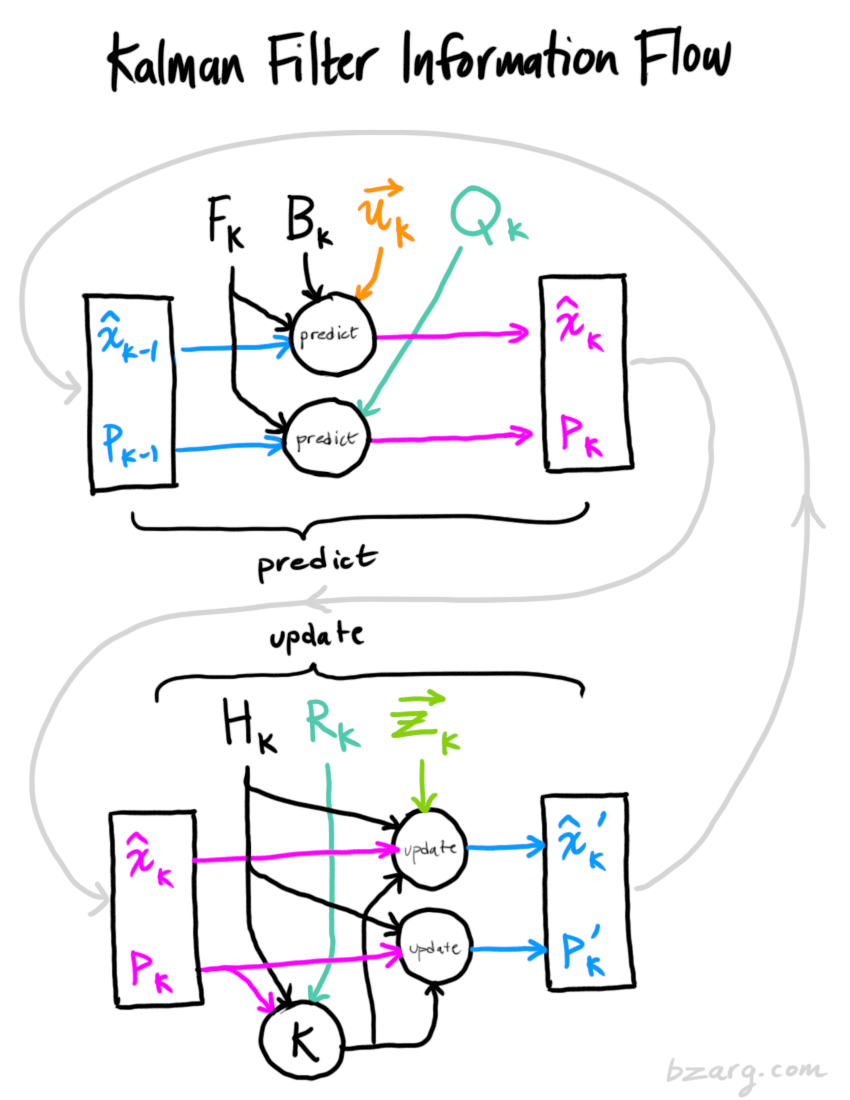
Process
1. Init
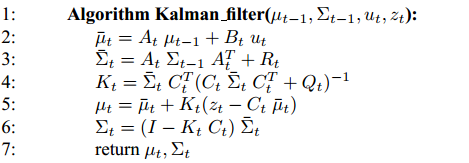
2. Predict
状态转移:由运动方程做先验估计 \(x_k^- = A \cdot x_{k-1} + B \cdot u_{k} \tag3\) 协方差转移 \(P_k^- = A \cdot P_{k-1} \cdot A^T + Q \tag4\)
3. Update
计算卡尔曼增益(中间量) \(K_k = P_k^- H^T (HP_k^-H^T + R )^{-1} \tag 5\) 状态更新 \(x_k := x_k^- + K_k(\underbrace{ z_k - \underbrace{H x_k^-}_{\rm measure} }_{\rm error}) \tag 6\) 协方差更新 \(P_k := (I - K_k H)P_k^- \tag 7\)
Process
Tips
-
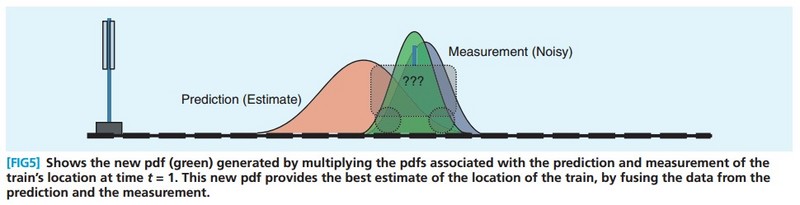
Kalman filter defines every state with Guissian $(\eta, \sigma^2)$.
Kalman filter predicts and updates not only $\eta$, but also $\sigma$.
While Bayesian filter only offer a $\eta$
-
What is K for? 卡尔曼增益是干啥用的?
卡尔曼增益 K 是卡尔曼滤波器的核心参数,它决定了如何在预测值和观测值之间进行权衡:
数学意义:
- K 是一个权重矩阵,用于平衡预测估计和观测测量的可信度
- 当 K 接近 0 时,更信任预测值(模型),忽略观测值
- 当 K 接近 1 时,更信任观测值(传感器),忽略预测值
物理直觉:
- 如果预测的不确定性很大(P 大),而观测噪声很小(R 小),则 K 会增大,更相信观测值
- 如果预测很准确(P 小),而观测噪声很大(R 大),则 K 会减小,更相信预测值
- K 实现了最优的信息融合,使得后验估计的方差最小
计算公式解析: \(K_k = \frac{P_k^-}{P_k^- + R/H^2} = \frac{\text{预测不确定性}}{\text{预测不确定性} + \text{观测不确定性}}\)
这个比例关系确保了滤波器能够自适应地调整对预测和观测的信任程度。
EKF
Extended Kalman filter(扩展卡尔曼滤波,EKF)
refitem:
- introductory paper https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf
Model
1. Similarities with KF
- 状态量服从正态分布
- 观测量服从正态分布
- 过程噪声服从均值为 0 的正态分布
- 观测噪声服从均值为 0 的正态分布
2. Difference between KF
- EKF中 状态转移函数和(或)观测函数为非线性函数
- 在卡尔曼滤波的前提假设中,认为状态方程中的状态转移函数
以及观测方程中的测函数
均为线性函数。
- 基于这种线性假设,存在常数或常矩阵
,使得
,使得
- 不同于标准卡尔曼滤波,扩展卡尔曼滤波处理的是非线性系统,假设系统的状态转移函数和(或)观测函数为非线性函数。
- 在卡尔曼滤波的前提假设中,认为状态方程中的状态转移函数
扩展卡尔曼滤波的处理方法非常简单:将非线性方程一阶泰勒展开成线性方程:
1.1 运动方程
\[x_k = f ( x_{k-1}, u_{k}) + w_{k} \tag8\]非线性方程线性化 \(x_k^- = f ( x_{k-1}, u_{k}, 0) \tag9 \\ F_{k-1} = \frac {\partial f(x_{k-1}, u_k, w_k) }{\partial x_{k-1} } | _{x_{k-1}, u_k,0}\)
1.2 观测方程
\[z_k = h ( x_k) + v_k \tag{10}\]非线性方程线性化 \(z_k = h(x_k, 0) \tag{11} \\ H_k = \frac{\partial h(x_k,v_k)}{\partial x_k} | _{x_{k}, 0}\)
Process
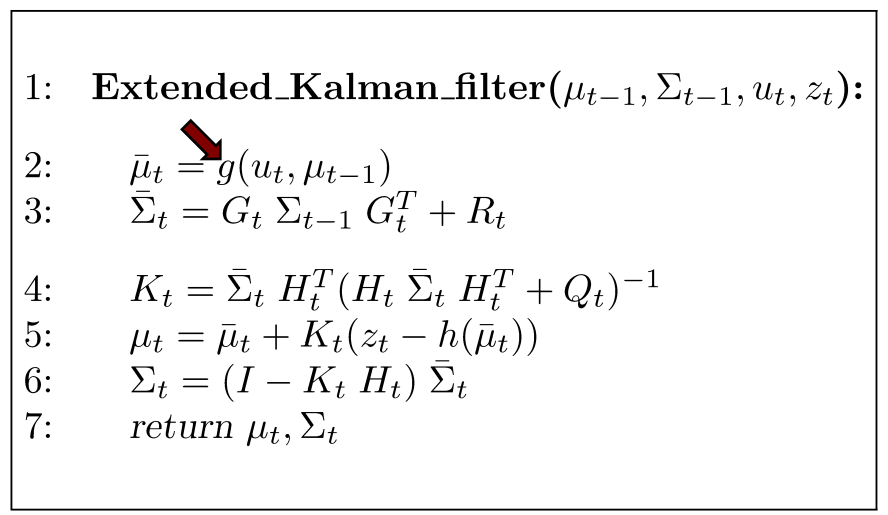
Notice: 图中箭头所指的非线性函数!是与卡尔曼滤波的区别,图中的g即本文档中的f.