相机的内外参标定原理,与棋盘格标定方法,以及OpenCV提供库方法的简单笔记。 Camera internal and external parameter calibration.
Camera Calibrate
Created 2020.07.13 by Cong Yu; Last modified: 2022.09.01-v1.1.1 -> 2022.09.02-v1.1.2
Contact: windmillyucong@163.com
Copyleft! 2022 Cong Yu. Some rights reserved.
REFERENCES
- opencv module Camera Calibration and 3D Reconstruction 一份重要的参考资料
- opencv tutorial doc Camera calibration and 3D reconstruction (calib3d module)
- opencv doc Calibration with ArUco and ChArUco
1. Camera model
相机模型
- 本小节主要讲针孔模型 pinhole camera model.
- 此外还有鱼眼相机模型 Fisheye camera model 本文暂不讨论
1.1 针孔相机的投影模型
Camera intrinsic matrix
相机内参矩阵A,通常也写作K
\(A = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}\) 其中:
- fx fy: 焦距
- cx cy: 主点偏移
无畸变的投影模型 The distortion-free projective transformation.
\[s \ p = A \ [R|t] \ P_w \tag1\]where
- $P_w$ is a 3D point expressed with respect to the world coordinate system,
- $p$ is a 2D pixel in the image plane,
- $A$ is the camera intrinsic matrix,
- $R$ and $t$ are the rotation and translation that describe the change of coordinates from world to camera coordinate systems (or camera frame)
- and $s$ is the projective transformation’s arbitrary scaling and not part of the camera model. 影射变换的尺度部分,与相机模型无关
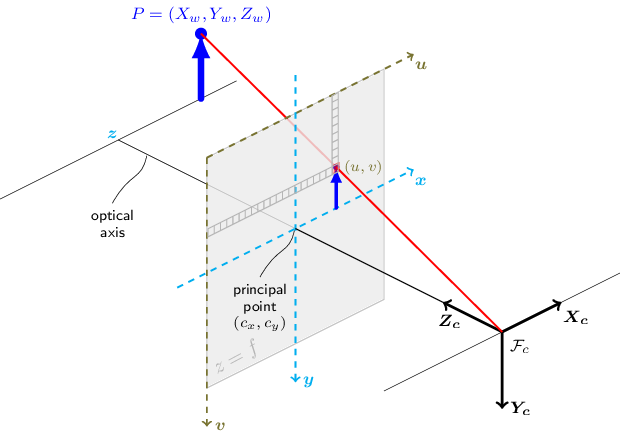 Fig1. Pinhole camera model
Fig1. Pinhole camera model
注意:相机坐标系的方向规定为:假设你的眼睛是相机,右手方向为x,脚的方向为y,目光直视方向(正前方)为z。得到的图像视野为左上方到右下方。横宽竖窄。
世界坐标系转相机坐标系 \(P_c = \begin{bmatrix} R | t \\ \end{bmatrix} P_w \tag2\) 相机坐标系归一化 \(P^`_c = \begin{bmatrix} x^` \\ y^` \\ 1 \end{bmatrix} = \frac 1 {Z_c} P_c = \frac 1 {Z_c} \begin{bmatrix}X_c \\ Y_c \\ Z_c \end{bmatrix} \tag 3\) 相机归一化坐标系转像素坐标系 \(s \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = A P^`_c \tag4\) 总结为: \(s\begin{bmatrix} u \\ v\\ 1 \end{bmatrix} = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} R | t \\ \end{bmatrix}_{3,4} \begin{bmatrix} X_w \\ Y_w \\ Z_w \\ 1 \end{bmatrix} \tag5\) 简写做 式(1)
1.2 相机畸变
畸变分类
Real lenses usually have some distortion, mostly radial distortion, and slight tangential distortion.
畸变 distortion 包括两部分:
- mostly radial distortion, 主要是径向畸变
- 枕形畸变
- 桶形畸变
-
and slight tangential distortion. 以及轻微的切向畸变: 切向畸变是由于镜头与图像平面不完全平行造成的。它会导致图像中的点相对于其理想位置发生偏移,这种偏移主要表现为图像中的点沿着切线方向移动。切向畸变通常比径向畸变小,但在某些情况下(如广角镜头)也会比较明显。
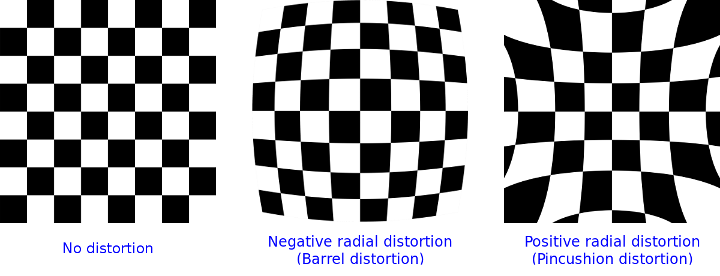
Fig2. radial distortion
畸变模型
- 畸变作用于相机归一化坐标系 $P_c^`$ ,
- 畸变后记为 $P^{``}_c$ 。
- 畸变模型为: \(\begin{bmatrix} x^{``} \\ y^{``} \end{bmatrix} = \begin{bmatrix} x^{`} \frac{ 1+k_1 r^2 + k_2 r^4 + k_3 r^6 }{1+k_4 r^2 + k_5 r^4 + k_6 r^6} + 2 p_1 x^` y^` + p_2(r^2 + 2 x^{`2}) + s_1 r^2 + s_2 r^4 \\ y^{`} \frac{1+k_1 r^2 + k_2 r^4 + k_3 r^6 }{1+k_4 r^2 + k_5 r^4 + k_6 r^6} + 2 p_2 x^` y^` + p_1(r^2 + 2 y^{`2}) + s_3 r^2 + s_4 r^4 \end{bmatrix} \tag 6\) 其中 \(r^2 = x^2 + y^2\)
k1, k2, k3, k4, k5, k6 p1, p2, s1, s2, s3, and s4是畸变参数
畸变参数
The distortion parameters:
- k1, k2, k3, k4, k5, and k6: the radial coefficients 径向畸变系数
- p1, p2 tangential distortion coefficients 切向畸变系数
- s1, s2, s3, and s4, are the thin prism distortion coefficients. 薄棱镜畸变系数
- (k1,k2,p1,p2[,k3[,k4,k5,k6[,s1,s2,s3,s4[,τx,τy]]]]) 必要参数与非必要参数
注意:
- OpenCV中不考虑高阶系数
- More generally, radial distortion must be monotonic and the distortion function must be bijective. 真实镜头中径向畸变总是单调递减的,且畸变函数必须是双映摄的
- 如果不满足上述条件,则应该认为校准失败。OpenCV使用的校准优化方法里不提供上述约束
2. 校准步骤
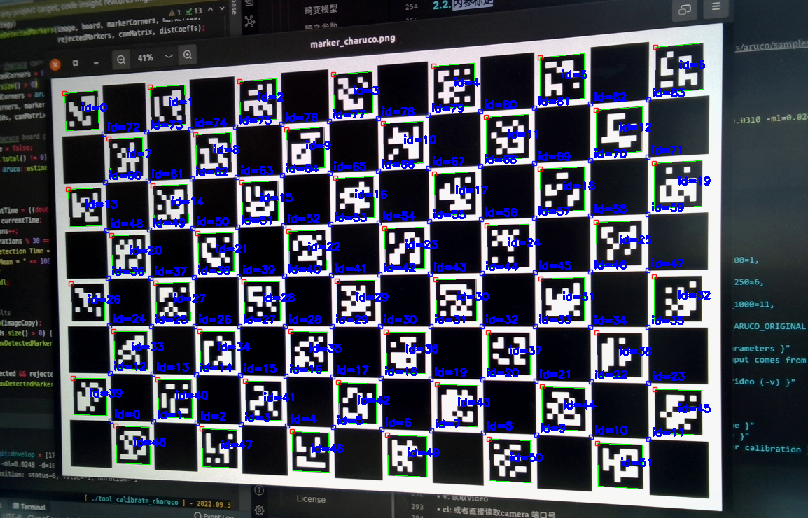
2.1 生成 ChArUco 标定板
Create a ChArUco board image.
OpenCV例程
- https://github.com/opencv/opencv_contrib/blob/master/modules/aruco/samples/create_board_charuco.cpp
示例:
1
./create_board_charuco ./marker_charuco.png -w=13 -h=8 -sl=200 -ml=160 -d=10 -bb=1 -si=1
参数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
const char* keys =
"{@outfile |<none> | Output image }"
"{w | | Number of squares in X direction }"
"{h | | Number of squares in Y direction }"
"{sl | | Square side length (in pixels) }"
"{ml | | Marker side length (in pixels) }"
"{d | | dictionary: DICT_4X4_50=0, DICT_4X4_100=1, "
"DICT_4X4_250=2,"
"DICT_4X4_1000=3, DICT_5X5_50=4, DICT_5X5_100=5, DICT_5X5_250=6, "
"DICT_5X5_1000=7, "
"DICT_6X6_50=8, DICT_6X6_100=9, DICT_6X6_250=10, DICT_6X6_1000=11, "
"DICT_7X7_50=12,"
"DICT_7X7_100=13, DICT_7X7_250=14, DICT_7X7_1000=15, DICT_ARUCO_ORIGINAL = "
"16}"
"{m | | Margins size (in pixels). Default is "
"(squareLength-markerLength) }"
"{bb | 1 | Number of bits in marker borders }"
"{si | false | show generated image }";
- w: x方向的格子数
- h: y方向的格子数
- sl: 格子的大小 pix
- ml: 格子里marker的大小 pix
- d: marker的字典
- 4x4表示二维码为4x4 bit大小,共有16个二进制位
- bb: marker的边框为几个bit
- si: show image 是否显示生成的标定板
主要函数: CharucoBoard::create()
- https://docs.opencv.org/4.x/d0/d3c/classcv_1_1aruco_1_1CharucoBoard.html#aa83b0a885d4dd137a41686991f85594c
c++
1
2
3
4
5
6
static Ptr<CharucoBoard> cv::aruco::CharucoBoard::create ( int squaresX,
int squaresY,
float squareLength,
float markerLength,
const Ptr< Dictionary > & dictionary
)
python
1
cv.aruco.CharucoBoard_create( squaresX, squaresY, squareLength, markerLength, dictionary ) -> retval
参数说明
| Parameters | 说明 | 说明 |
|---|---|---|
| squaresX | number of chessboard squares in X direction | x方向的格子数 |
| squaresY | number of chessboard squares in Y direction | y方向的格子数 |
| squareLength | chessboard square side length (normally in meters) | 格子的长度(单位:m) |
| markerLength | marker side length (same unit than squareLength) | marker的长度(单位:m) |
2.2. 内参标定
OpenCV例程
- Calibration with ArUco and ChArUco
- code https://github.com/opencv/opencv_contrib/blob/master/modules/aruco/samples/calibrate_camera_charuco.cpp
示例:
1
./calibrate_camera_charuco ./calibrate_result.txt -w=13 -h=8 -sl=0.0310 -ml=0.0248 -d=10 -ci=4
参数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
const char* keys =
"{w | | Number of squares in X direction }"
"{h | | Number of squares in Y direction }"
"{sl | | Square side length (in meters) }"
"{ml | | Marker side length (in meters) }"
"{d | | dictionary: DICT_4X4_50=0, DICT_4X4_100=1, DICT_4X4_250=2,"
"DICT_4X4_1000=3, DICT_5X5_50=4, DICT_5X5_100=5, DICT_5X5_250=6, DICT_5X5_1000=7, "
"DICT_6X6_50=8, DICT_6X6_100=9, DICT_6X6_250=10, DICT_6X6_1000=11, DICT_7X7_50=12,"
"DICT_7X7_100=13, DICT_7X7_250=14, DICT_7X7_1000=15, DICT_ARUCO_ORIGINAL = 16}"
"{@outfile |<none> | Output file with calibrated camera parameters }"
"{v | | Input from video file, if ommited, input comes from camera }"
"{ci | 0 | Camera id if input doesnt come from video (-v) }"
"{dp | | File of marker detector parameters }"
"{rs | false | Apply refind strategy }"
"{zt | false | Assume zero tangential distortion }"
"{a | | Fix aspect ratio (fx/fy) to this value }"
"{pc | false | Fix the principal point at the center }"
"{sc | false | Show detected chessboard corners after calibration }";
- sl: 方格大小,注意单位m,需要自己测量。
- ml: marker的大小,单位m
- v: 读取video
- ci: 或者直接读取camera 端口号
注意:一个小技巧,tool_create_charuco运行后直接在显示屏上显示标定板,不要打印出来,那么同一个显示屏配置下,显示出来的实际物理尺寸大小也是确定的!!! 不需要每次都重新测量。
主要函数 : calibrateCameraCharuco()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
double cv::aruco::calibrateCameraCharuco ( InputArrayOfArrays charucoCorners,
InputArrayOfArrays charucoIds,
const Ptr< CharucoBoard > & board,
Size imageSize,
InputOutputArray cameraMatrix,
InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs,
OutputArrayOfArrays tvecs,
OutputArray stdDeviationsIntrinsics,
OutputArray stdDeviationsExtrinsics,
OutputArray perViewErrors,
int flags = 0,
const TermCriteria & criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, DBL_EPSILON)
)
1
cv.aruco.calibrateCameraCharuco( charucoCorners, charucoIds, board, imageSize, cameraMatrix, distCoeffs[, rvecs[, tvecs[, flags[, criteria]]]]
参数说明
- charucoCorners: vector of detected charuco corners per frame
- charucoIds: list of identifiers for each corner in charucoCorners per frame
- board: 标定板对象
- imageSize: 输入图像的大小
- cameraMatrix: Output 相机内参矩阵$A$
- distCoeffs: Output 相机畸变参数 vector of distortion coefficients
- (k1,k2,p1,p2[,k3[,k4,k5,k6],[s1,s2,s3,s4]]) of 4, 5, 8 or 12 elements
- rvecs: Output vector of rotation vectors (see cv::Rodrigues 罗德里格斯) estimated for each board view (e.g. std::vector<cv::Mat»). 每个标定板的外参的姿态,由旋转向量表达。
- That is, each k-th rotation vector together with the corresponding k-th translation vector (see the next output parameter description) brings the board pattern from the model coordinate space (in which object points are specified) to the world coordinate space, that is, a real position of the board pattern in the k-th pattern view (k=0.. M -1). 相机的rt姿态
- cv::Rodrigues 罗德里格斯。
- tvecs: Output vector of translation vectors estimated for each pattern view. 相机的rt姿态
- stdDeviationsIntrinsics: Output vector of standard deviations estimated for intrinsic parameters. Order of deviations values: (fx,fy,cx,cy,k1,k2,p1,p2,k3,k4,k5,k6,s1,s2,s3,s4,τx,τy) If one of parameters is not estimated, it’s deviation is equals to zero. 内参估计的标准差
- stdDeviationsExtrinsics: Output vector of standard deviations estimated for extrinsic parameters. Order of deviations values: (R1,T1,…,RM,TM) where M is number of pattern views, Ri,Ti are concatenated 1x3 vectors.外参估计的标准差
- perViewErrors: Output vector of average re-projection errors estimated for each pattern view. 每一帧的平均冲投影误差
- flags: 不同的标志位,可以是零或以下值的组合:
- CALIB_USE_INTRINSIC_GUESS: cameraMatrix包含有效的初始值fx, fy, cx, cy,这些值会在优化过程中进一步调整
- CALIB_FIX_ASPECT_RATIO: 函数只将fy作为自由参数。fx/fy的比值保持与输入cameraMatrix中相同
- CALIB_FIX_PRINCIPAL_POINT: 主点在全局优化过程中保持不变
- CALIB_ZERO_TANGENT_DIST: 切向畸变系数(p1,p2)被设置为零并保持为零
- CALIB_FIX_K1,…,CALIB_FIX_K6: 对应的径向畸变系数在优化过程中保持不变
- CALIB_RATIONAL_MODEL: 启用系数k4, k5和k6
- CALIB_THIN_PRISM_MODEL: 启用系数s1, s2, s3和s4
- CALIB_FIX_S1_S2_S3_S4: 薄棱镜畸变系数在优化过程中保持不变
- CALIB_TILTED_MODEL: 启用系数tauX和tauY
- CALIB_FIX_TAUX_TAUY: 倾斜传感器模型的系数在优化过程中保持不变
- criteria: 迭代优化算法的终止条件。包含最大迭代次数和/或期望精度。默认值为TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, DBL_EPSILON)
返回值
- The function returns the final re-projection error. 返回最终的重投影误差。
校准参数文件的IO
保存参数文件
可以实现一个saveCameraParams()方法保存相机参数到文件。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
static bool saveCameraParams(const string &filename, Size imageSize,
float aspectRatio, int flags,
const Mat &cameraMatrix, const Mat &distCoeffs,
double totalAvgErr) {
FileStorage fs(filename, FileStorage::WRITE);
if (!fs.isOpened()) return false;
time_t tt;
time(&tt);
struct tm *t2 = localtime(&tt);
char buf[1024];
strftime(buf, sizeof(buf) - 1, "%c", t2);
fs << "calibration_time" << buf;
fs << "image_width" << imageSize.width;
fs << "image_height" << imageSize.height;
if (flags & CALIB_FIX_ASPECT_RATIO) fs << "aspectRatio" << aspectRatio;
if (flags != 0) {
sprintf(buf, "flags: %s%s%s%s",
flags & CALIB_USE_INTRINSIC_GUESS ? "+use_intrinsic_guess" : "",
flags & CALIB_FIX_ASPECT_RATIO ? "+fix_aspectRatio" : "",
flags & CALIB_FIX_PRINCIPAL_POINT ? "+fix_principal_point" : "",
flags & CALIB_ZERO_TANGENT_DIST ? "+zero_tangent_dist" : "");
}
fs << "flags" << flags;
fs << "camera_matrix" << cameraMatrix;
fs << "distortion_coefficients" << distCoeffs;
fs << "avg_reprojection_error" << totalAvgErr;
return true;
}
调用时,如下即可:
1
2
3
bool saveOk =
saveCameraParams(outputFile, imgSize, aspectRatio, calibrationFlags,
cameraMatrix, distCoeffs, repError);
保存的结果:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
%YAML:1.0
---
image_width: 2304
image_height: 1536
flags: 0
camera_matrix: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 1.7278790942145540e+03, 0., 1.1309385807730075e+03, 0.,
1.7266185538163652e+03, 7.5735707693874974e+02, 0., 0., 1. ]
distortion_coefficients: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ 6.3777903954352969e-02, -2.5340121133838989e-01,
8.2797304884093832e-04, 9.9076895476885444e-05,
2.6333203915318537e-01 ]
avg_reprojection_error: 3.2079151333906419e-01
读取参数文件
可以实现一个 readCameraParameters()方法读取上文保存的相机参数文件。
1
2
3
4
5
6
7
8
inline static bool readCameraParameters(std::string filename,
cv::Mat &camMatrix,
cv::Mat &distCoeffs) {
cv::FileStorage fs(filename, cv::FileStorage::READ);
if (!fs.isOpened()) return false;
fs["camera_matrix"] >> camMatrix;
fs["distortion_coefficients"] >> distCoeffs;
return true;}
调用时,如下即可:
1
2
3
4
5
6
7
Mat camMatrix, distCoeffs;
bool readOk =
readCameraParameters(parser.get<string>("c"), camMatrix, distCoeffs);
if (!readOk) {
cerr << "Invalid camera file" << endl;
return 0;
}
3. 校准参数的使用
主要函数:undistort()
The function transforms an image to compensate radial and tangential lens distortion.
1
2
3
4
5
6
void cv::undistort ( InputArray src,
OutputArray dst,
InputArray cameraMatrix,
InputArray distCoeffs,
InputArray newCameraMatrix = noArray()
)
1
cv.undistort( src, cameraMatrix, distCoeffs[, dst[, newCameraMatrix]] ) -> dst
代码片段示例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
cv::Mat camera_matrix_;
cv::Mat new_camera_matrix_;
cv::Vec<double, 5> dist_coeffs_;
camera_matrix_ = Mat(3, 3, CV_64FC1);
float scale = 0.8;
int shift_x = 0;
int shift_y = 0;
cv::Mat matrix = cv::Mat::eye(3, 3, CV_64FC1);
matrix.at<double>(0, 0) = scale;
matrix.at<double>(1, 1) = scale;
matrix.at<double>(0, 2) = shift_x;
matrix.at<double>(1, 2) = shift_y;
new_camera_matrix_ = camera_matrix_ * matrix;
cv::undistort(frame, frame_undistort, camera_matrix_, dist_coeffs_,
new_camera_matrix_);
函数:undistortPoints()
Computes the ideal point coordinates from the observed point coordinates.
1
2
3
4
5
6
7
void cv::undistortPoints ( InputArray src,
OutputArray dst,
InputArray cameraMatrix,
InputArray distCoeffs,
InputArray R = noArray(),
InputArray P = noArray()
)
1
2
cv.undistortPoints( src, cameraMatrix, distCoeffs[, dst[, R[, P]]] ) -> dst
cv.undistortPointsIter( src, cameraMatrix, distCoeffs, R, P, criteria[, dst] ) -> dst
4. 相机外参的估计
基于ChArUco board,做相机的外参标定
Contact
Feel free to contact me windmillyucong@163.com anytime for anything.
License
