DEMO
Created 2021.06.04 by Cong Yu; Last modified: 2021.06.04-v1.0.2
Contact: windmillyucong@163.com
Copyleft! 2022 Cong Yu. Some rights reserved.
AngleAxis
基本概念
- 三维中的任一位姿,都只有两种轴角表达,两个的关系是直接取负
- 用一个单位向量描述旋转轴,外加一个角度描述旋转角度。一起共4个参数描述三维旋转。
- 也可以使用非归一化的旋转轴描述三维旋转。
- 轴角表达也不是唯一的,一个姿态可以有两种表达。
约定
- robot坐标系 front x, left y, up z
- 欧拉角顺序 zyx ypr yaw pitch roll
- $\Psi$ 方向或偏航 (heading or yaw)
- $\theta$ 升降或俯仰 (elevation or pitch)
- $\phi$ 倾斜或横滚 (bank or roll)
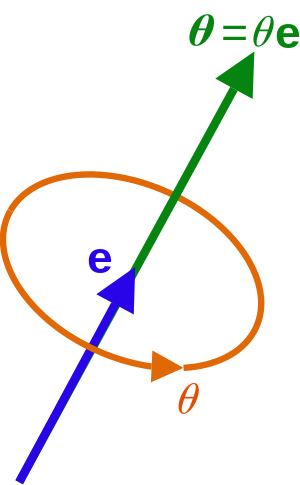
Rotations with axis and angle representation
构成 \(V = (v_x, v_y, v_z) \\ \theta\)
- notice: simultaneous rotation around a normalized vector $V$ by angle $\theta$
描述姿态
描述转动
特性
- one solution to gimbal lock
- no “order” of rotation, all at once around that vector