OctoMap: An Efficient Probabilistic 3D Mapping Framework Based on Octrees
Created 2022.07.14 by Cong Yu; Last modified: 2022.09.03-V1.1.0
Contact: windmillyucong@163.com
Copyleft! 2022 Cong Yu. Some rights reserved.
OctoMap
- code https://octomap.github.io/
- API doc http://octomap.github.io/octomap/doc/
- paper http://www.arminhornung.de/Research/pub/hornung13auro.pdf
Abstract
- We persent: an open-source framework to generate volumetric 3D environment models.
- Our mapping approach is based on
- octrees
- probabilistic occupancy estimation.
- It explicitly represents not only occupied space, but also free and unknown areas.
- Furthermore, we propose an octree map compression method that keeps the 3D models compact. 保证模型紧凑的压缩方法
- We present a series of experimental results carried out with real robots and on publicly available real-world datasets. The results demonstrate that our approach is able to update the representation efficiently and models the data consistently while keeping the memory requirement at a minimum. 具有可靠的实验结果
1 Introduction
-
bottleneck: The lack of readily available, reliable, and efficient implementations of 3D mapping.
- three requirements: 三个需求:
- probabilistic representation
- unmapped area
- Efficiency
-
Several approaches have been proposed to model 3D environments in robotics: 现有方案
- pcd
- store large amounts of measurement points and hence are not memoryefficient
- do not allow to differentiate between obstacle-free and unmapped areas 注意:能区分free和unknown是个非常重要的需求
- elevation maps (Hebert et al., 1989)
- efficient but do not represent unmapped areas either
- multi-level surface maps (Triebel et al., 2006)
- efficient but do not represent unmapped areas either
- Most importantly, these approaches cannot represent arbitrary 3D environments, such as the branches of the tree in the example. 无法反映一种拓扑结构
- volumetric (our framework)
- pcd
2 Related Work
略
3 OctoMap framework
3.1 Octrees
-
Octrees: 一种分层的数据结构 8叉空间表示(或许还可以有4维的?16叉,需要合理的物理意义)
-
voxel: node in an octree represents the space contained in a cubic volume. 体素
-
resolutions: 分辨率,体素的大小,不同层级使用不同的分辨率
-
volumetric model and tree representation.

-
Boolean property.
- In its most basic form, octrees can be used to model a Boolean property.
- 0 free or unknow.
- free 的解释: eg. laser传感器与end point之间都是free
- 1 occupied.
3.2 Probabilistic Sensor Fusion
-
log-odds
-
This formulation of the update rule allows for faster updates since multiplications are replaced by additions. 因为是加法,所以概率更新计算非常块
-
node 中保存log-odds,而非the occupancy probability
-
两者可以转换,但是log-odds的概率更新很迅速
-
但是要注意根据sensor的模型设置更新参数
-
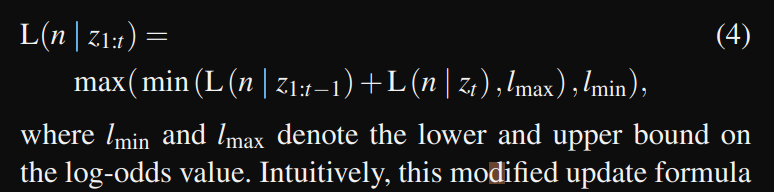
a clamping update policy: defines an upper and lower bound on the occupancy estimate
- two advantages:
- we ensure that the confidence in the map remains bounded and as a consequence the model can adapt to changes in the environment quickly
- we are able to compress neighboring voxels with pruning。
- two advantages:
-
最终的更新公式:occupancy estimates are updated according to
3.3 Multi-Resolution Queries
- 当有新测量插入时,只有叶子节点的概率会被更新
- 父节点的概率可以通过8个子节点的值计算得到,计算方法可以简单使用
- 8个子节点和的平均
- 8个子节点的最大值